We will hold the S1/S2 (Software Simulation) Racing Series on Saturday, May 7, 2022. We invite you to join us and compete by testing your autonomous AI agent in our software environment with the newly released Berkeley Major Map! The Berkeley ROAR team has created a customized CARLA map to facilitate the research and competition using the ROAR software in a simulated mixed urban/suburban environment.
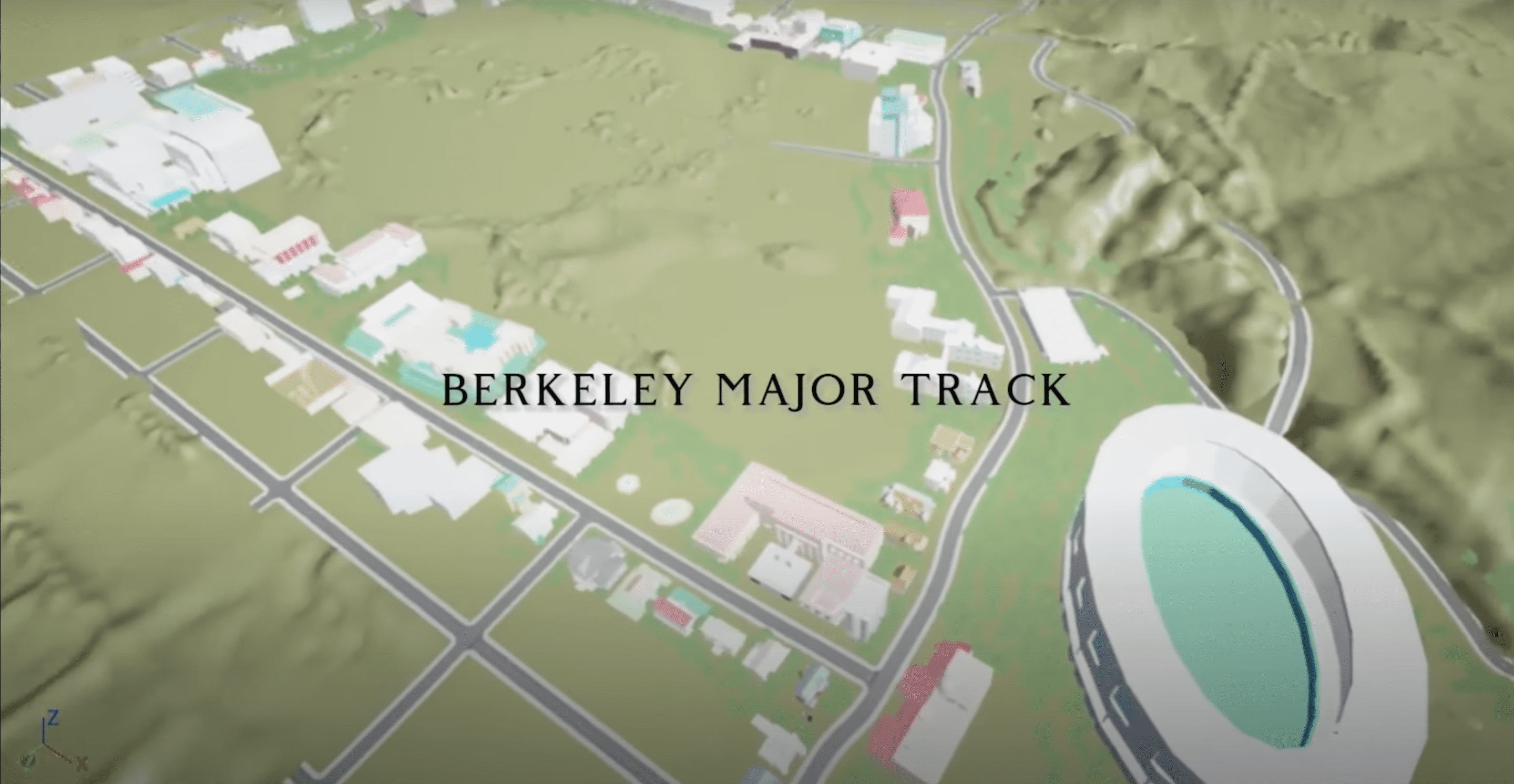
The Berkeley Major Map was created using CARLA and Unreal Engine, and was based on a 3D LIDAR scan of the Berkeley campus and its surrounding hill roads. The map includes a closed circuit that can be driven from both directions. The 3D model of the map accurately represents the altitude variation of the real streets where the model is based on in the real world. Read more and download the Berkeley Major Map here.
Learn more about the award criteria, prize pool, and guidelines here. Submission form is now open!